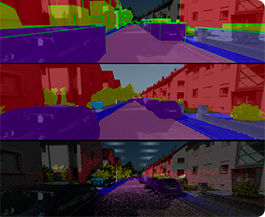
2D标注
2D标注包括包围盒、多(duō)边形、语义分(fēn)割、目标追踪四个部分(fēn)。













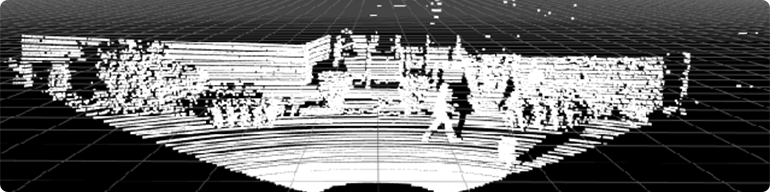
3D点云标注平台由SurfingTech开发并拥有(yǒu)。它有(yǒu)两个版本:离散图像标注和视频序列标注。
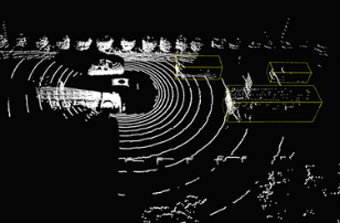
离散图像是指没有(yǒu)时间顺序连接的单帧点云数据。每个帧图像需要分(fēn)别标注如下所示。通常情况下,单帧图像中的点个数不够,因此需要将二维图像的颜色投影到三维点云数据中相应的点上。同时,标注者需要参考2D图像来完成标注。
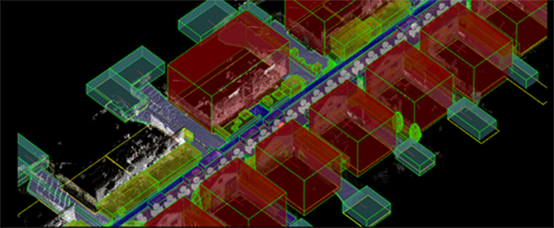
对于基于场景的视频序列标注,我们首先利用(yòng)帧间的连续性对3D场景进行重构,然后在3D场景中进行标注。将标注投影到二维图像的每一帧和点云数据上,形成标注结果。